
NATURE Stack
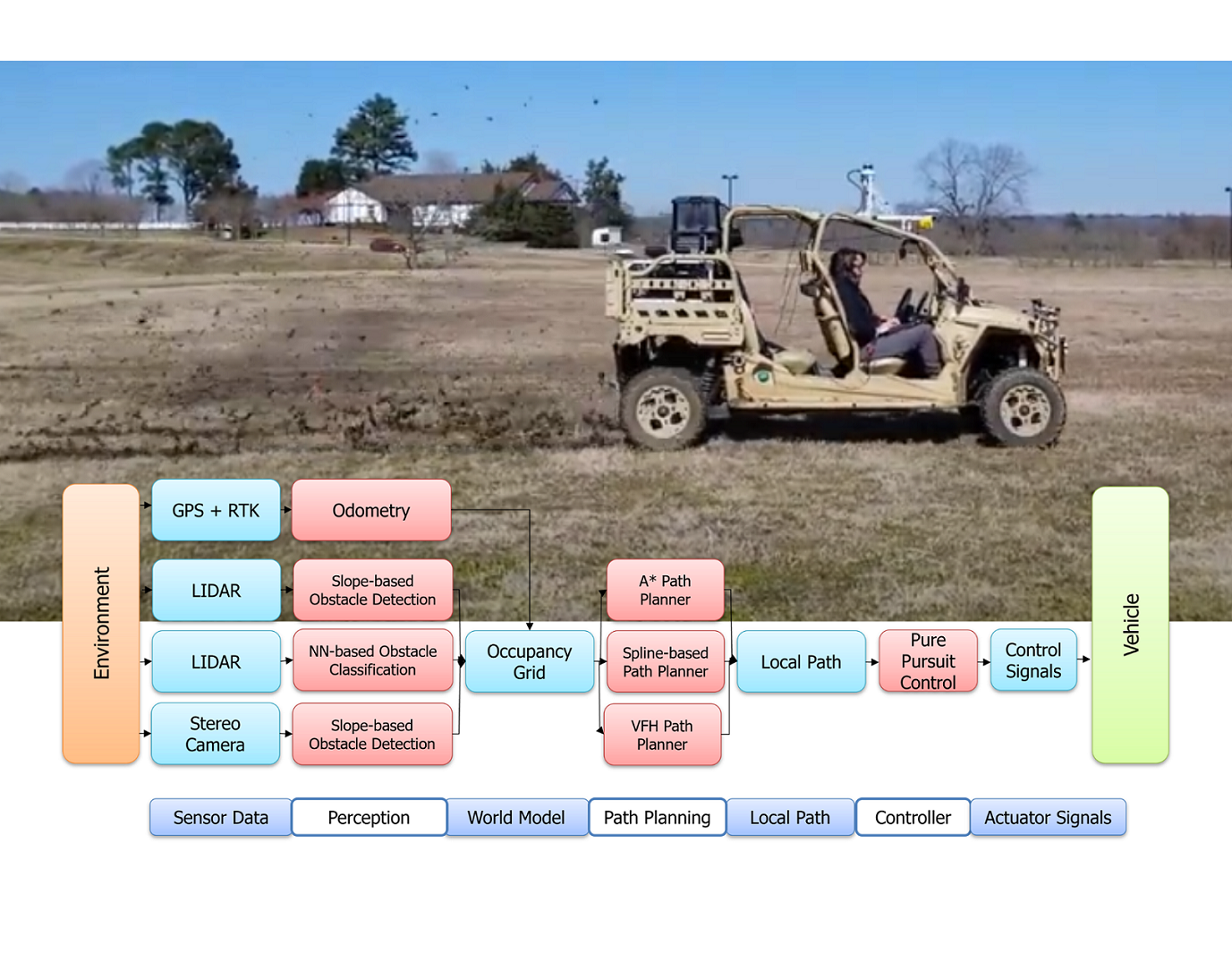
The NATURE (Navigating All Terrains Using Robotic Exploration) stack is a free and open-source autonomy stack for off-road navigation by wheeled vehicles. The NATURE stack features modules for path planning, vehicle control, and perception. Written in ROS, it can be used on real vehicles or coupled to a simulator like the MAVS.
Why NATURE?
Autonomous navigation in off-road environments breaks many of the assumptions built into other autonomy algorithms. Without road networks, engineer slopes, and vegetation-free path options, the problem of off-road navigations is more complex and open-ended than on-road autonomy.
The NATURE stack provides a starting point for researchers interested in studying off-road autonomy by providing a full suite of algorithms (global and local planning, vehicle control, and perception) designed for off-road navigation.
NATURE is being used by researchers at the US Army Engineer Research and Development Center to support the development of advanced simulation tools, and provided the foundation for the stack used by the NATO AVT-341 working group on “Mobility Assessment Methods and Tools for Autonomous Military Ground Systems”. The NATURE stack supports a variety of ongoing research into off-road autonomy at MSU-CAVS.