
Experimental Vehicles
Data collected with these vehicles provide CAVS researchers with an in-depth understanding of complex, off-road environments. CAVS researchers take that understanding and develop and test computer algorithms that will enable vehicles to make real-time, intelligent decisions about how to navigate in the complex, unstructured world that lies off the main roads.
Clearpath Warthog

The Clearpath Warthog is a 610 lb. remote controlled amphibious robot. Clearpath is an industry leader in providing robot platforms for research and development. The Warthog comes equipped with basic autonomy software. CAVS researchers are developing and testing novel image processing and path planning algorithms for off-road navigation. The CAVS Warthog is equipped with LiDAR, cameras, GPS, IMU, an NVIDIA Drive AGX Pegasus, and other sensors to gather data about the environment.
Clearpath Jackal

The Clearpath Jackal is a small (20" x 17" x 10") field robotics platform. The Jackal is equipped with onboard computing, sensors, and ROS software for autonomy. CAVS is equipping the Jackal with additional sensors and teaming it with UAV systems to test ground-air vehicle teaming for navigation.
Clearpath Husky

The Clearpath Husky is a medium sized (39" x 27" x 15") field robotics platform. The Husky is equipped with onboard computing, NVIDIA GPU, Inertial Measurement Unit (IMU), Velodyne VLP-16 LiDAR sensor, Intel Realsense camera and ROS software for autonomy. The Husky's rugged construction and high-torque drive train allows for rough-terrain navigation. In addition, the Husky's large payload capacity allows CAVS to customize the sensors and power options to further support our autonomy research. The Husky robot will be used as a medium-scale testbench for research and development in off-road mobility, path planning, LiDAR sensing, as well as localization and mapping algorithms.
Polaris MRZR

The Polaris MRZR is a rugged, all-terrain four-person vehicle sometimes used by military special forces. The CAVS MRZR is equipped with an Applied Research Associates (ARA) drive-by-wire system with actuators for steering, braking, and acceleration. The drive-by-wire system allows remote control or autonomous navigation to GPS waypoints. The MRZR provides a platform for developing algorithms for fast autonomous navigation in complex, off-road environments.
Litetrax MTX-C

The Litetrax MTX-C is a tracked amphibious off-road vehicle. While the MTX-C is not equipped with a drive-by-wire system, it allows CAVS researchers to collect data to study tracked vehicle performance and to develop algorithms for perception and navigation in soft soils and in water.
Autonomous RC Platform
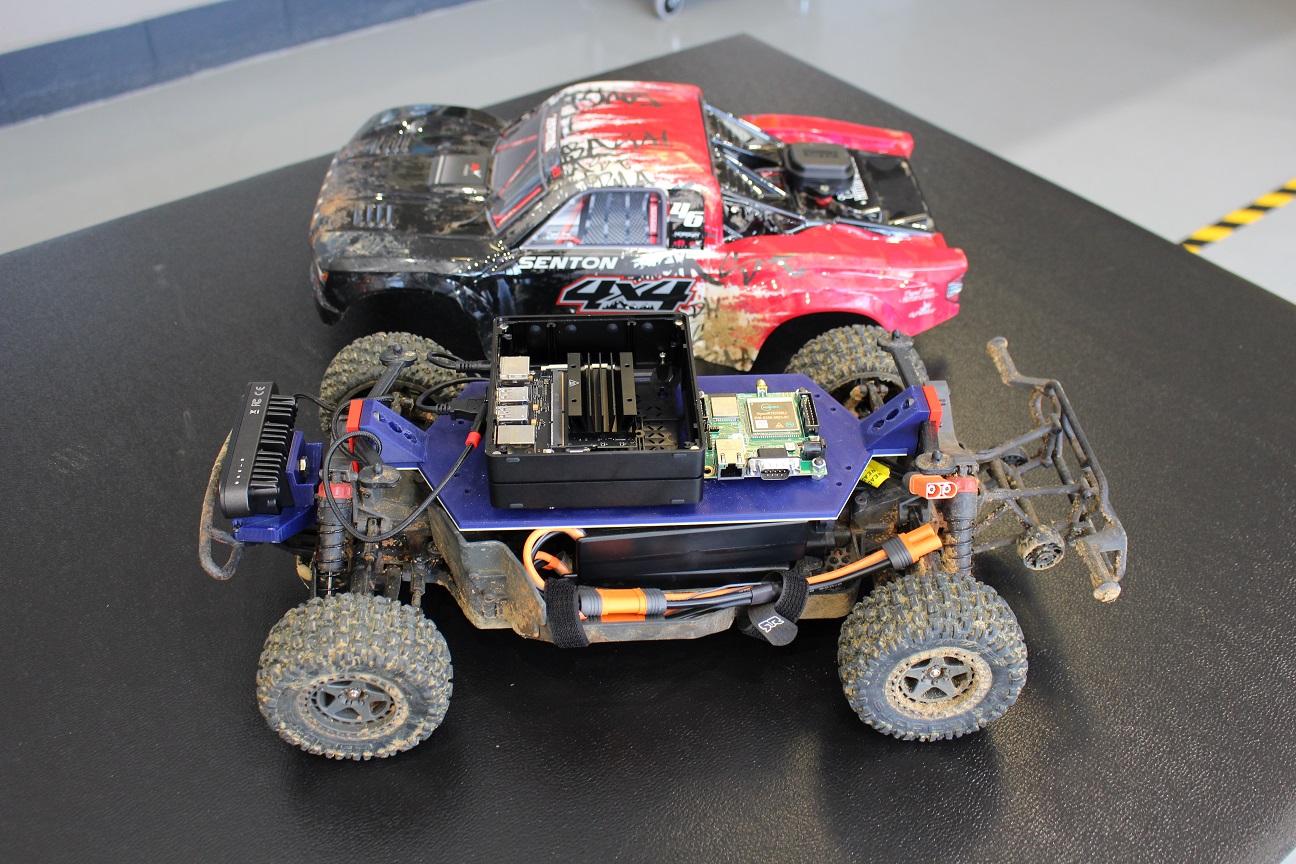

The platform is a consumer 1/10 scale RC car (Arrma Senton) modified for autonomous control. The chassis offers full independent suspension and 4WD with limited slip differentials. For sensing, the platform has a front-mounted Oak-D stereo camera and a Aceinna OpenRTK330 RTK-corrected INS. The stock motor controller is replaced with a Trampa VESC EDU, allowing basic speed control and odometry. A Jetson Nano is mounted onboard for sensor processing and control. The entire system costs $2000 and all components mount underneath the stock plastic body, giving a clean, integrated look. Top speed is 5.25 m/s or 11.75 mph.
Vehicle Sensor Kits

Each of our off-road vehicles are equipped with Ouster LiDAR units, Sekonix HD cameras, SwiftNav GPS and IMU sensors, along with additional sensors selected to gather data and understand the vehicle's operating environment. Sensor data is processed in real-time by an Nvidia Drive AGX Pegasus and stored on a 17TB Quantum R3000 storage system. The Pegasus is our main compute system with two Nvidia Xavier system-on-a-chip and two Turing GPUs. In total, the Pegasus is capable of 320 Trillion operations per second.