
Proving Ground
The CAVS Proving Ground is a center-wide resource for development and testing of vehicular technology, including advanced materials, unmanned aerial systems, automated vehicles, and mobility characterization. Comprised of 55 acres of rugged off-road courses, the proving ground features various terrains including rocks, tall grass, wooded trails, and lowlands.
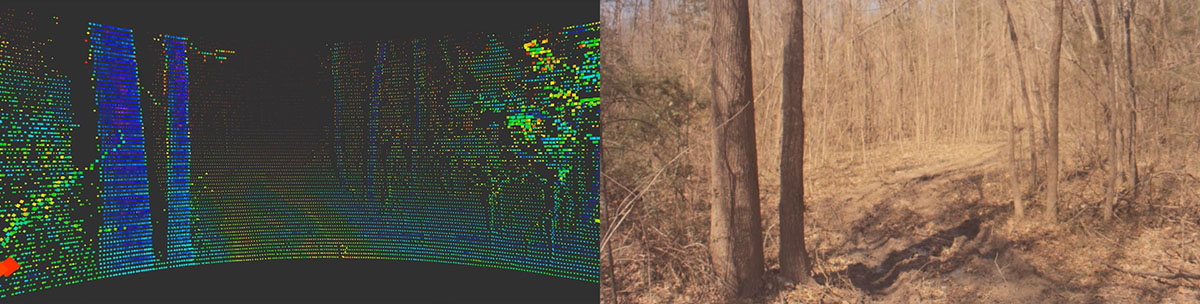
The site is particularly suited for off-road autonomous vehicle development where unstructured, off-road environments can be very different than those for structured, on-road applications. A typical on-road deep learning system must focus on identifying cars, pedestrians and traffic signals, and is built to respond to highway markings, such as signage and lane markings. In contrast, off-road autonomous vehicles must be able to detect trees, rocks, abrupt changes in elevation and other obstacles. Active sensors, LiDAR for example, also respond differently to organic materials, such as foilage, than to man-made materials, like steel and glass. The CAVS Proving Ground provides natural resources suitable for testing and development sensors and algorithms for off-road automated vehicles.
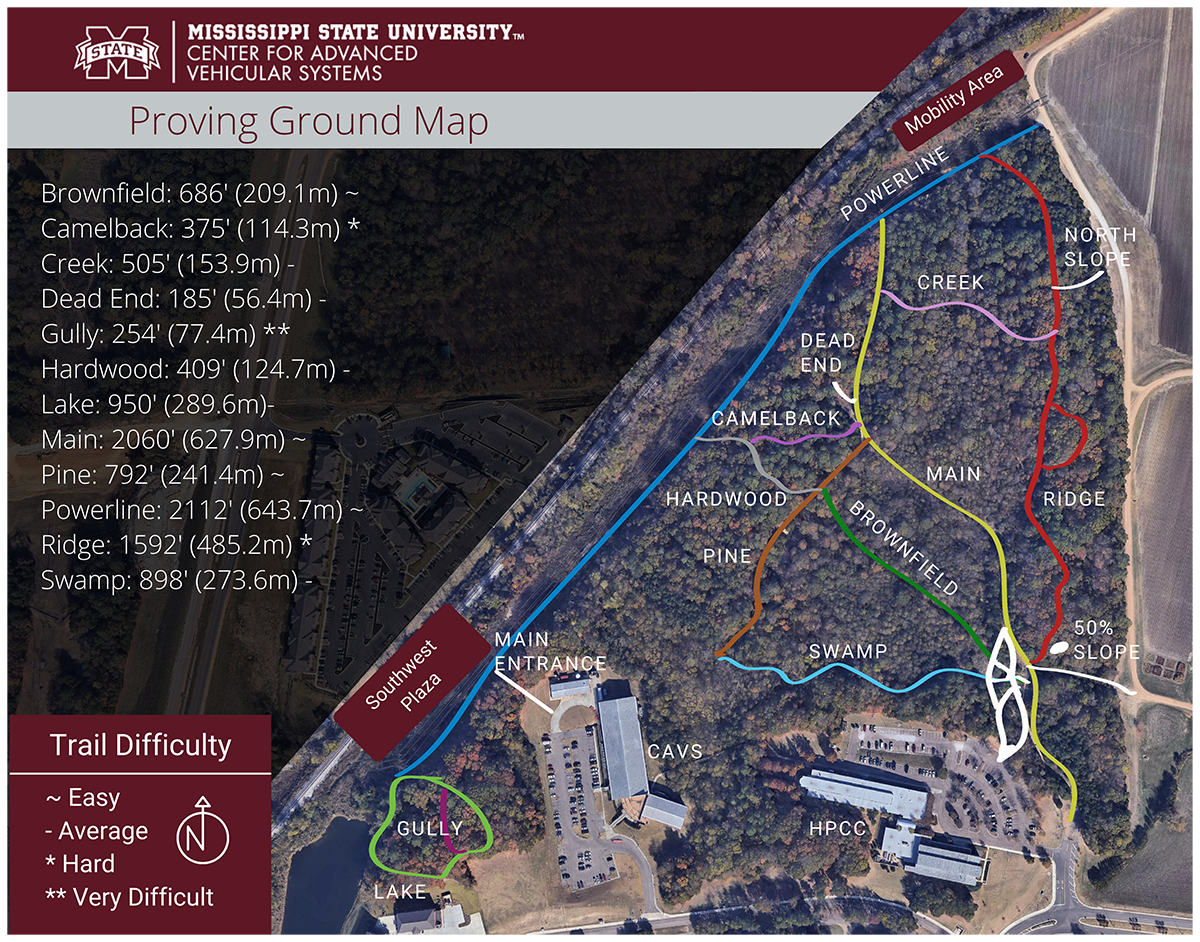
Map of CAVS Proving Ground
For more information about the CAVS proving ground, please contact Sara Fuller.
Virtual Tour
Data Library
CAVS is collecting data from a variety of off-road environments in order to build a comprehensive data set.
Developing and evaluating new vehicles and algorithms requires data taken from relevant environments. CAVS is assembling autonomous vehicle sensor data taken from a variety of off-road environments in order to allow researchers (within both MSU and the general scientific community) to advance autonomous vehicles. This includes high-resolution LiDAR data, HD camera data, precise GPS data, and IMU data, with up to six time-synced camera perspectives in raw HD frames.
The next step in order to create useful data is to annotate classifications of objects and regions in the data. CAVS is involved in this process, while also researching and standardizing appropriate annotation methods for data taken in unstructured environments.
Sensor and Algorithm Benchmarking and Evaluation
The CAVS proving ground allows for testing of autonomous vehicles sensors and algorithms in a controlled, repeatable environment. Key natural features have been digitized to allow correlation between simulations and real-world testing. The proving ground also provides for evaluation of sensor performance with organic surfaces, which may have different reflective properties.


Sensor Degradation
Autonomous vehicles must be resilient against degradation of independent sensors, such as GPS loss due to tree canopy, camera obstructions from dirt or mud, and reduced performance due to weather. The CAVS proving ground provides natural resources for testing such scenarios.

Vehicle-terrain Interaction
In imperfect terrain, wheel slip affects autonomous vehicle performance. Off-road capable autonomous vehicles should account for vehicle-terrain interaction effects when planning and executing paths. The CAVS proving ground allows evaluation of the effects and tools for development of intelligent off-road path planning algorithms and vehicle models for incorporating the effects of vehicle-terrain interaction.